

Switching Control of Nonlinear Systems Based on the Quasi-ARX Model and the SVR Algorithm
-
摘要:
该文基于改进的含有外部输入项的准线性自回归(准ARX)径向基函数(RBF)网络模型和支持向量回归(SVR)算法,提出了一种非线性切换控制方法。 改进的准ARX模型非线性部分采用RBF网络。 控制系统设计过程分为三个部分:首先,利用聚类方法确定模型的非线性参数;然后,采用线性SVR算法来解决控制系统的鲁棒性问题;接下来,基于控制误差给出切换判定函数,确定切换律给出控制序列。 最后通过数值仿真验证了该方法的有效性。
Abstract:A nonlinear switching control method was proposed based on an improved quasilinear autoregressive with exogenous inputs (quasi-ARX) radial basis function (RBF) network model and the support vector regression (SVR) algorithm. The RBF network was chosen as the nonlinear part of the improved quasi-ARX prediction model. The proposed controller design method was divided into 3 steps: firstly, the nonlinear parameters of the model were determined with the clustering method; secondly, the linear SVR algorithm was used to solve the robustness problem of the control system; thirdly, the switching criterion function was given based on the control error, and the control sequence were determined according to the switching law. Finally, a numerical example was given to verify the effectiveness of the proposed method.
-
Key words:
- quasi-ARX model /
- stability /
- support vector regression /
- nonlinear switching control
-
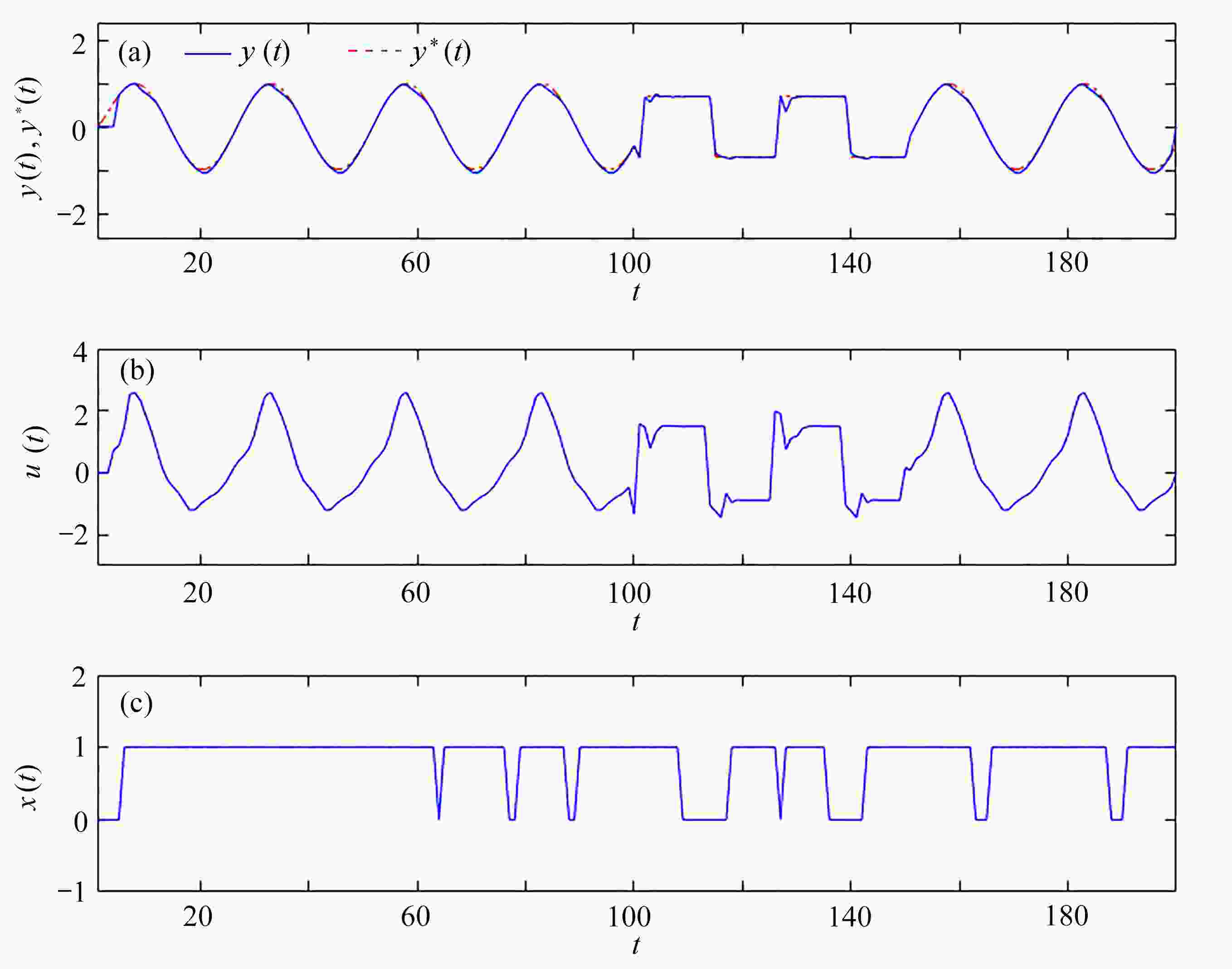
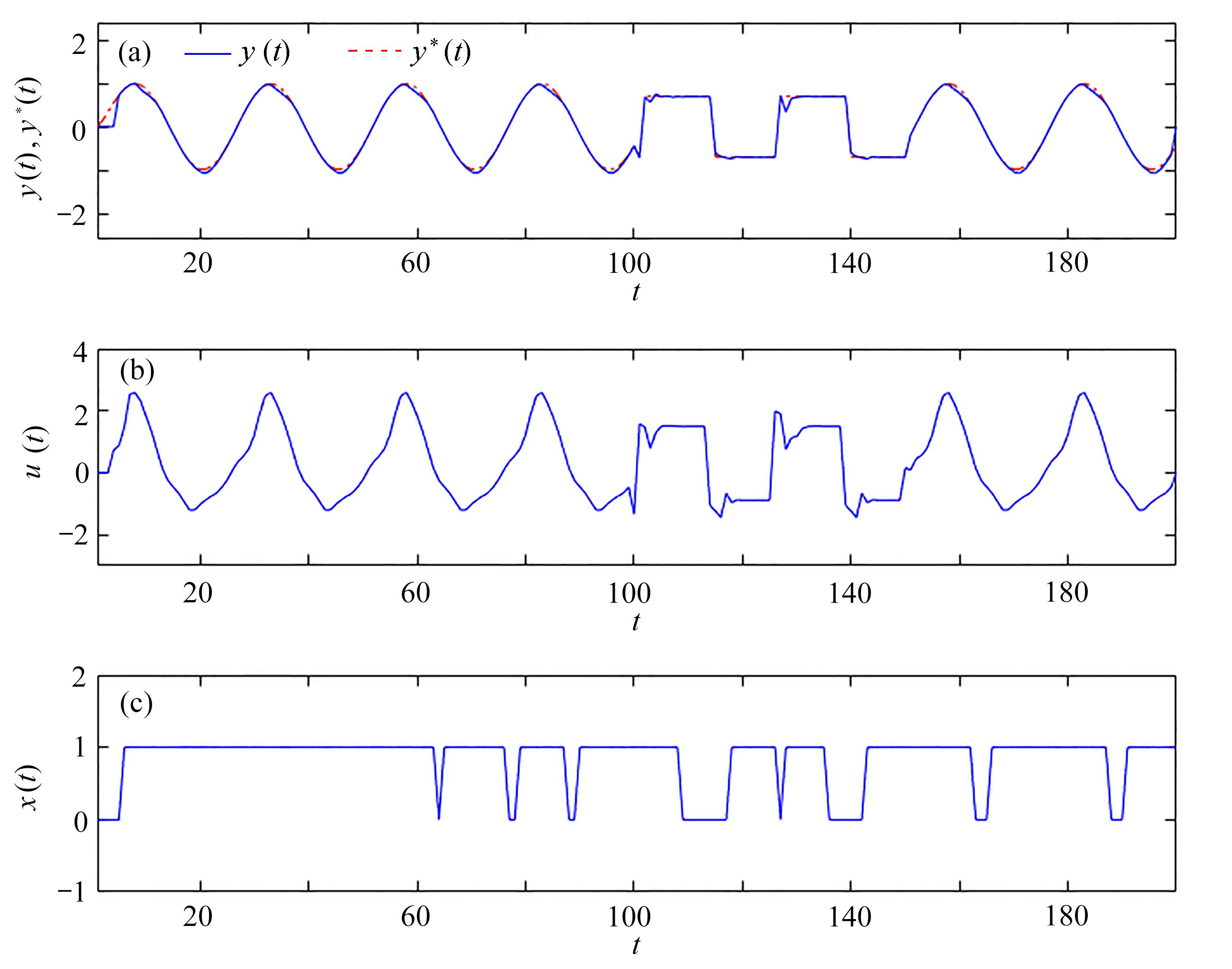
图 1 仿真例子的控制结果图:(a) 控制输出
$ y(t) $ ,期望输出$ y^*(t) $ ;(b) 输入序列$ u(t) $ ;(c)切换序列$ \chi(t) $ Figure 1. Control results of the example: (a) control output
$ y(t) $ and desired output$ y^*(t) $ ; (b) control input$ u(t) $ ; (c) switching sequence$ \chi(t) $ 表 1 基于噪声
$ v(t) $ 情况下控制误差对比表$ v(t) $ Table 1. Comparison of errors with the noise
mean of errors variance of errors linear control $-0.115 \;0$ $0.095\;3$ NN control $-0.010\;3$ $0.008\;0$ third control $-0.016\;3$ $0.007\;5$ proposed control $-0.004\;3$ $0.005\;3$  下载: 导出CSV
下载: 导出CSV
-
[1] HU J, HIRASAWA K, KUMAMARU K. A neurofuzzy-based adaptive predictor for control of nonlinear systems[J]. Transactions of the Society of Instrument and Control Engineers, 1999, 35(8): 1060-1068. [2] 赵玮, 任凤丽. 基于自适应控制的四元数时滞神经网络的有限时间同步[J]. 应用数学和力学, 2022, 43(1): 94-103ZHAO Wei, REN Fengli. Finite time adaptive synchronization of quaternion-value neural networks with time delays[J]. Applied Mathematics and Mechanics, 2022, 43(1): 94-103.(in Chinese) [3] YOUNG P C, MCKENNA P, BRUUN J. Identification of non-linear stochastic systems by state dependent parameter estimation[J]. International Journal of Control, 2001, 74(18): 1837-1857. [4] XI Y G, LI D W, LIN S. Model predictive control-status and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236. [5] 王兰, 谢达, 董宜平, 等. 基于准 ARX 多层学习网络模型的非线性系统自适应控制[J]. 应用数学和力学, 2019, 40(11): 1214-1223WANG Lan, XIE Da, DONG Yiping, et al. Adaptive control of nonlinear systems based on quasi-ARX multilayer learning network models[J]. Applied Mathematics and Mechanics, 2019, 40(11): 1214-1223.(in Chinese) [6] NARENDRA K S, PARTHASARATHY K. Identification and control of dynamical systems using neural networks[J]. IEEE Transactions on Neural Networks, 1990, 1(1): 4-27. [7] LI D P, LIU Y J, TONG S C, et al. Neural networks-based adaptive control for nonlinear state constrained systems with input delay[J]. IEEE Transactions on Cybernetics, 2019, 49(4): 1249-1258. [8] WANG L, CHENG Y, HU J, et al. Nonlinear system identification using quasi-ARX RBFN models with a parameter-classified scheme[J]. Complexity, 2017, 2017: 1-12. [9] WU J, SUN W, SU S F, et al. Neural-based adaptive control for nonlinear systems with quantized input and the output constraint[J]. Applied Mathematics and Computation, 2022, 413: 126637. [10] BILLINGS S A, WEI H L. A new class of wavelet networks for nonlinear system identification[J]. IEEE Transactions on Neural Networks, 2005, 16(4): 862-874. [11] WANG L, CHENG Y, HU J. Stabilizing switching control for nonlinear system based on quasi-ARX RBFN model[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2012, 7(4): 390-396. [12] CHENG L, WANG Z, JIANG F, et al. Adaptive neural network control of nonlinear systems with unknown dynamics[J]. Advances in Space Research, 2021, 67(3): 1114-1123. [13] JANOT A, YOUNG P C, GAUTIER M. Identification and control of electro-mechanical systems using state-dependent parameter estimation[J]. International Journal of Control, 2017, 90(4): 643-660. [14] YANG D, LI X, QIU J. Output tracking control of delayed switched systems via state-dependent switching and dynamic output feedback[J]. Nonlinear Analysis: Hybrid Systems, 2019, 32: 294-305. [15] BECHLIOULIS C P, ROVITHAKIS G A. Prescribed performance adaptive control for multi-input multi-output affine in the control nonlinear systems[J]. IEEE Transactions on Automatic Control, 2010, 55(5): 1220-1226. [16] AWAD M, KHANNA R. Support Vector Regression[M]//Efficient Learning Machines. Berkeley: Apress, 2015: 67-80. [17] TOIVONEN H T, TÖTTERMAN S, ÅKESSON B M. Identification of state-dependent parameter models with support vector regression[J]. International Journal of Control, 2007, 80(9): 1454-1470. [18] GOOGWIN G C, SIN K S. Adaptive Filtering Prediction and Control[M]. Dover Publications, 1984. [19] WANG L, CHENG Y, HU J. A quasi-ARX neural network with switching mechanism to adaptive control of nonlinear systems[J]. SICE Journal of Control, Measurement, and System Integration, 2010, 3(4): 246-252. -











计量
- 文章访问数: 666
- HTML全文浏览量: 294
- PDF下载量: 45
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号