2023, 44(5): 525-534.
doi: 10.21656/1000-0887.430382
Abstract:
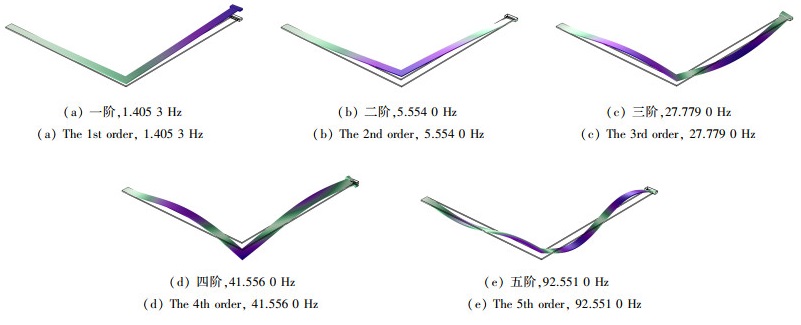
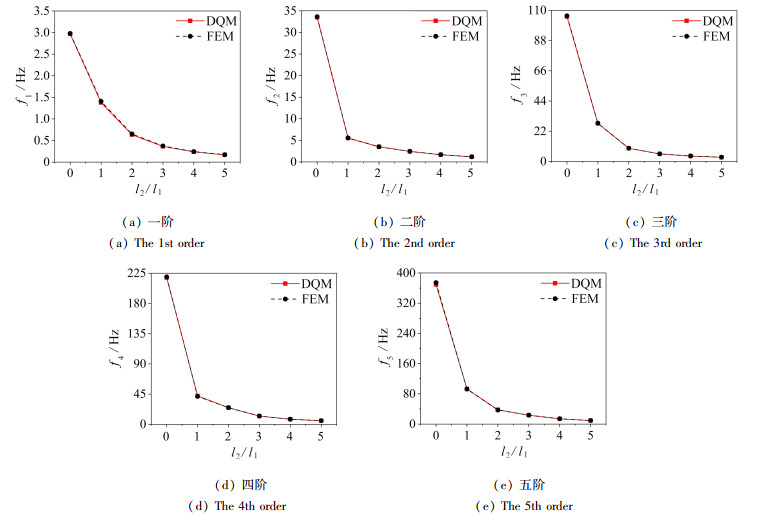
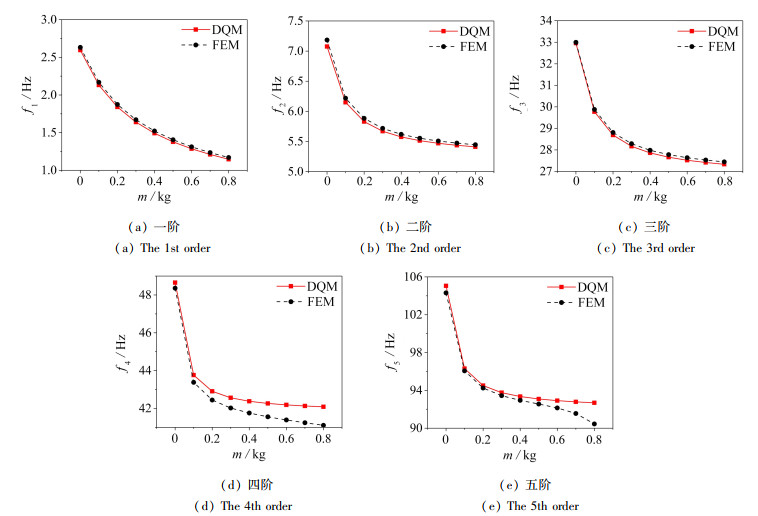
The L-shaped cantilever beam structure has many unique advantages such as large flexibility, strong designability, full utilization of space and various deformation modes during vibration, and is widely regarded and studied. A differential quadrature method was proposed to solve the natural frequencies and modes of rectangular-section homogeneous slender L-shaped cantilever beams with additional end masses. In the double coordinate systems, the dynamic equations for the L-shaped cantilever beam based on the Euler-Bernoulli beam theory were established. With selected roots of the Chebyshev polynomial as the node coordinates, the Lagrange interpolation basis function was employed, the weight coefficients of each order were solved, and the boundary conditions were considered, to obtain the natural frequencies and modes of all orders of the structure through resolution of the generalized matrix eigenvalue problem. The theoretical solution of the natural frequencies was verified in comparison with the previous theoretical results and the finite element results. Finally, the effects of the end mass, the length ratio, the width and the thickness of the inner and outer beams on the natural vibration characteristics of all orders were discussed. This method can be further applied to the study of related structural vibrations.